



6-محور تعليم يا آرٽيڪيوليٽڊ روبوٽ بازو، ڊي آءِ ڊيلٽا يا ڪئميرا روبوٽ بازو
وضاحت
محور: 6
وڌ ۾ وڌ پيل لوڊ: 4 ڪلوگرام
بار بار هنڌ: ±0.01mm
استعمال جي نمي: 20-80٪
سيج ماحول: 0 ℃ -45 ℃
انسٽاليشن: زمين
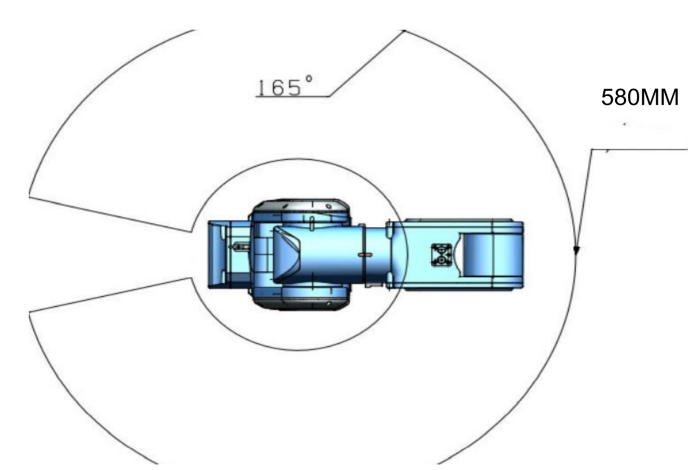
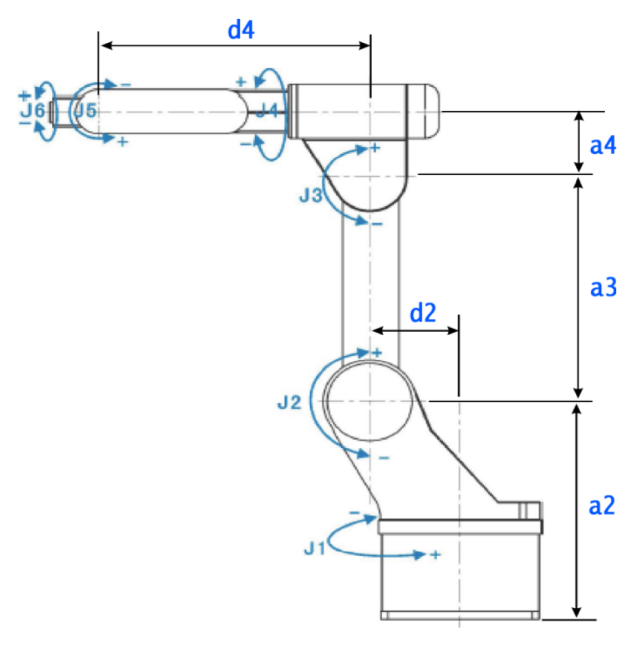
ڪم ڪرڻ جي حد: J1:±165°
جي2:-100°~+120°
جي 3:+150° ~-60°
جي 4: ± 175 °
جي 5:+130° ~-30°
جي 6: ± 180°
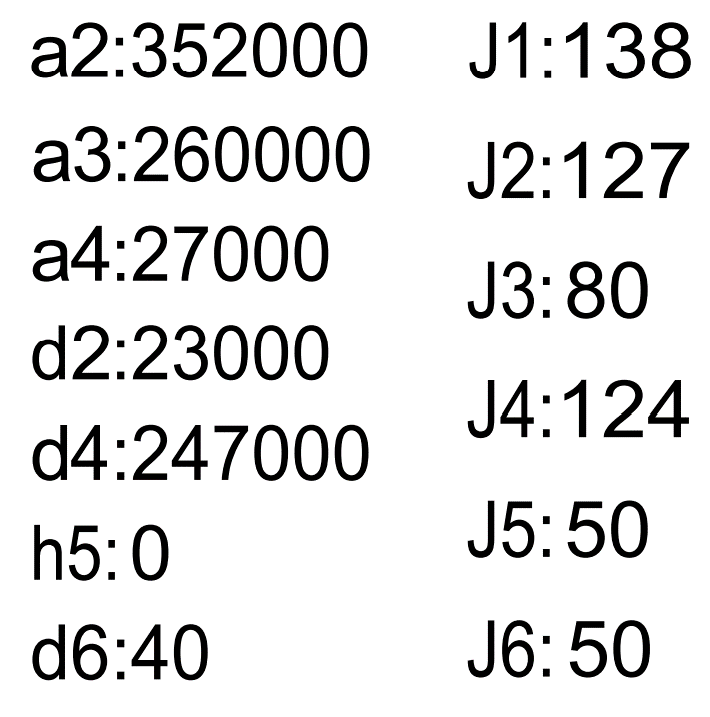
وڌ ۾ وڌ رفتار: J1:260°/s
جي 2: 250 ° / سيڪنڊ
جي 3: 250 ° / سيڪنڊ
جي 4: 250 ° / سيڪنڊ
جي 5: 200 ° / سيڪنڊ
جي 6: 760°/سيڪنڊ
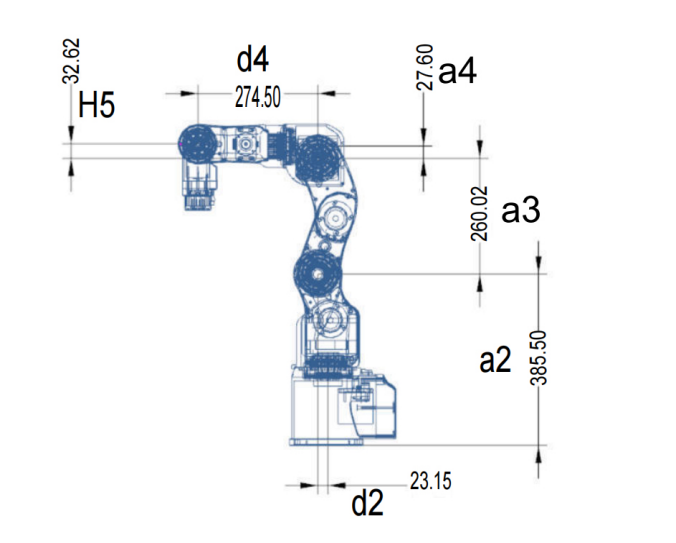
ڪم ڪندڙ حد:
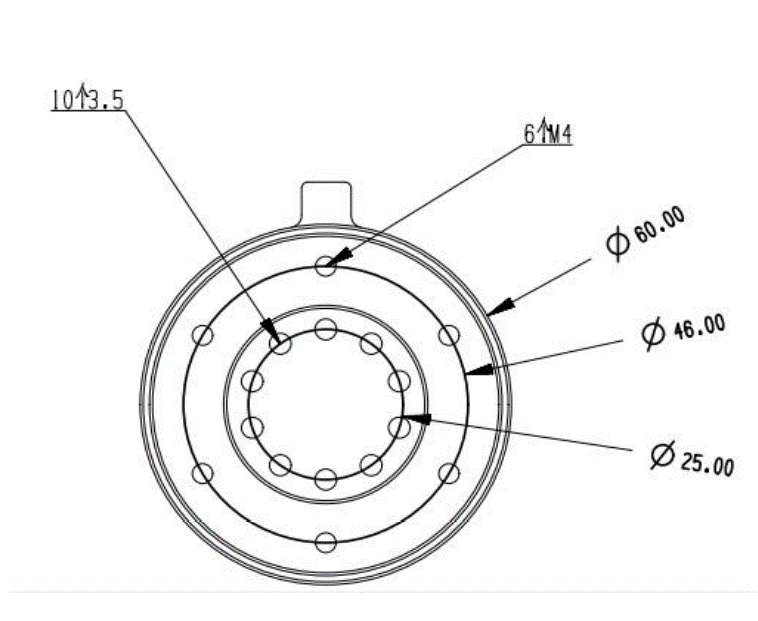
بنيادي تنصيب:
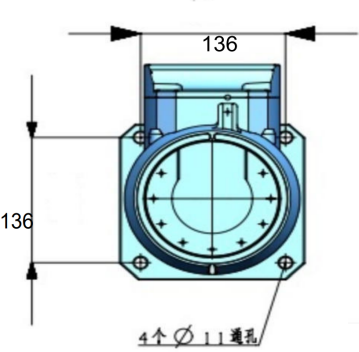
بنيادي تنصيب:
درخواستون
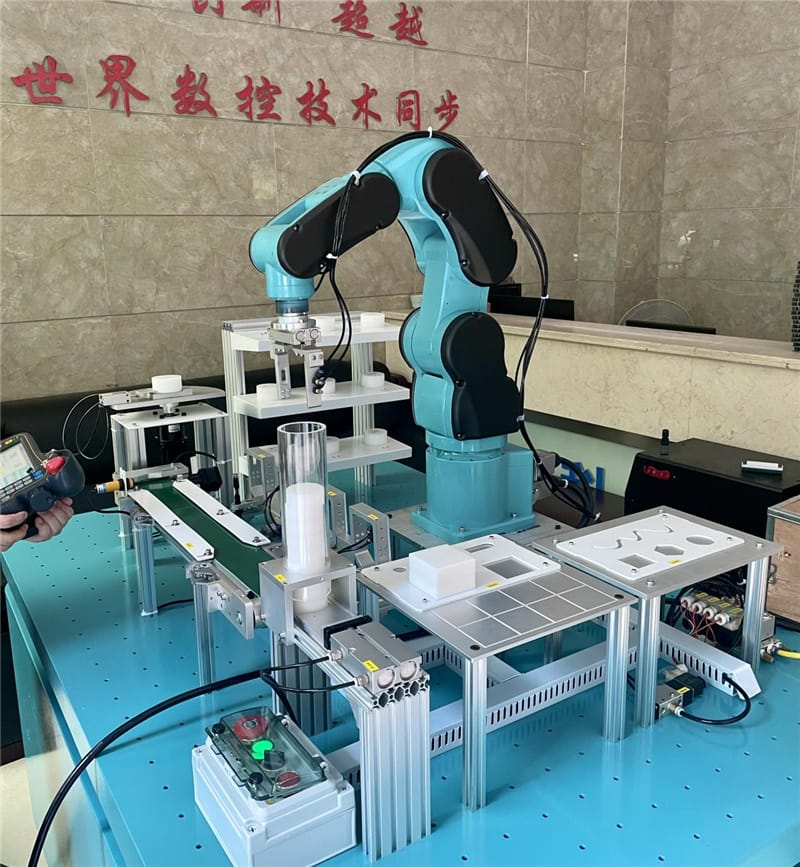
تعليمي اپليڪيشن:
1. روبوٽ سسٽم جي بنيادي بناوت جو مطالعو ڪرڻ.
2. روبوٽ جي پروگرامنگ ۽ تدريسي ڪمن جو مطالعو ڪرڻ لاءِ پينڊنٽ سيکاريو.
3. روبوٽ آف لائن پروگرامنگ جي بنيادي ڄاڻ جو مطالعو ڪرڻ.
4. روبوٽ io جي آپريشن ۽ ايپليڪيشن پروگرامنگ جو مطالعو ڪرڻ.
5. روبوٽ بصري ايپليڪيشنن جو مطالعو ڪرڻ
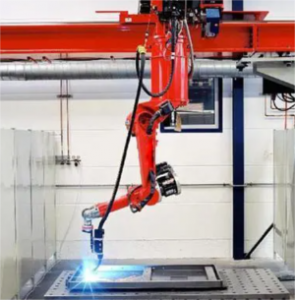
ڪمرشل منظر: روبوٽ آئس ڪريم روبوٽ بارٽينڈر روبوٽ ڪافي روبوٽ کير چانهه هلڪي صنعت جا منظر: ماپڻ، ورهائڻ، چڪاس، ترتيب ڏيڻ
پيداوار جون خاصيتون
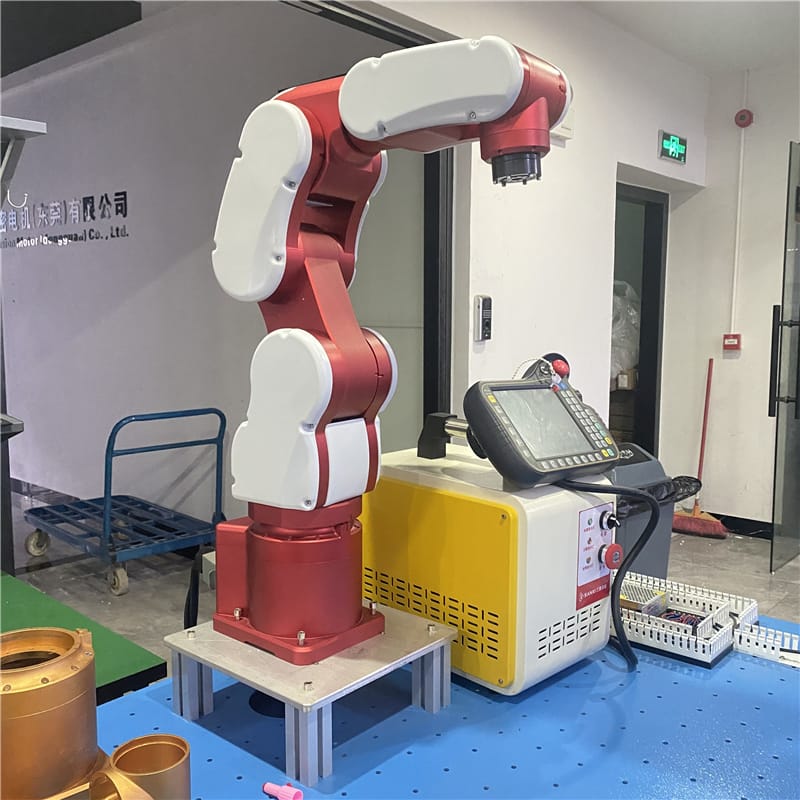
روبوٽڪ بازو: روبوٽڪ بازو سي اين سي مشيننگ سينٽر ذريعي ايلومينيم ڪاسٽنگ مان ٺهيل آهي، ۽ مٿاڇري تي پلاسٽڪ اسپري ڪئي وئي آهي ۽ هڪ خوبصورت ظاهر آهي.
محفوظ ڪيبل هول: روبوٽ بازو ۾ محفوظ ڪيبل هول آهن، جيڪي خوبصورت آهن ۽ مينپوليٽر جي آپريشن ۾ رڪاوٽ نه بڻجن ٿا. ٽريچيا جو آخر پورٽ ۽ ڊيٽا ڪيبل ڪنيڪٽر لاءِ محفوظ آهي.
ڪنٽرولر پينل: وڏي اسڪرين وارو LCD ڊسپلي، ٻولي ڊسپلي جو طريقو گراهڪ جي ضرورتن، سادو ۽ واضح آپريشن ۽ پروگرامنگ تي ٻڌل ٿي سگهي ٿو، آن لائن پيرا ميٽر ترميم ۽ غلطي خود تشخيص جي ڪمن سان.
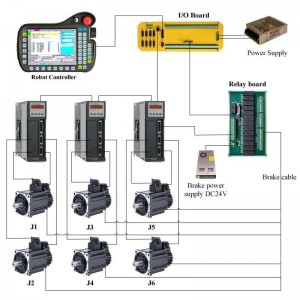
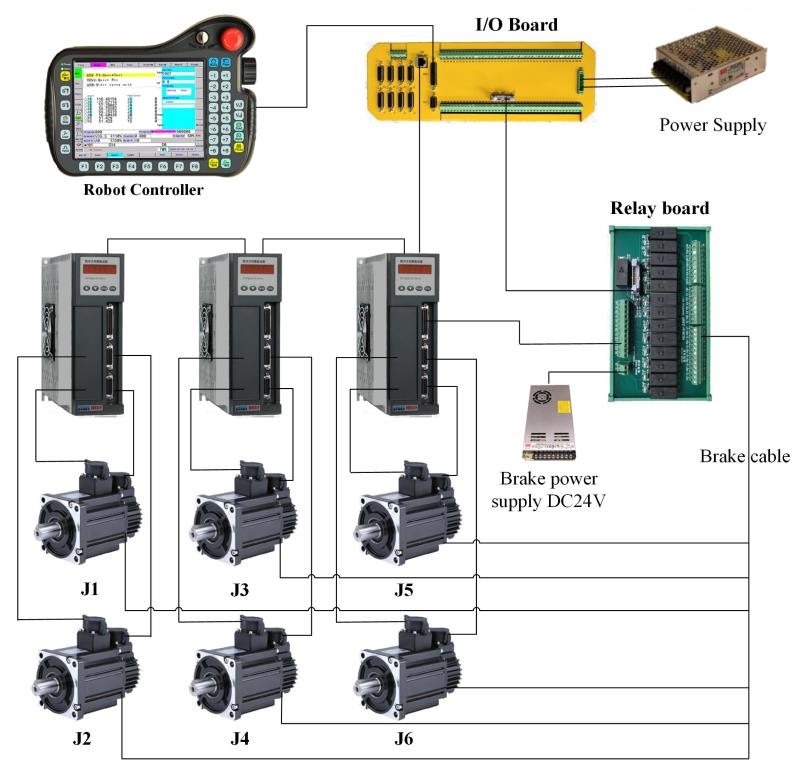
روبوٽ ڪنٽرول ڪابينا: ذهين حرڪت ڪنٽرول سسٽم صنعتي ڪمپيوٽر ٽيڪنالاجي کي اختيار ڪري ٿو، ۽ آل ڊجيٽل سروو ماڊيول روبوٽ جي هر جوائنٽ جي اي سي سروو موٽرز لاءِ ڊرائيونگ پاور فراهم ڪري ٿو.
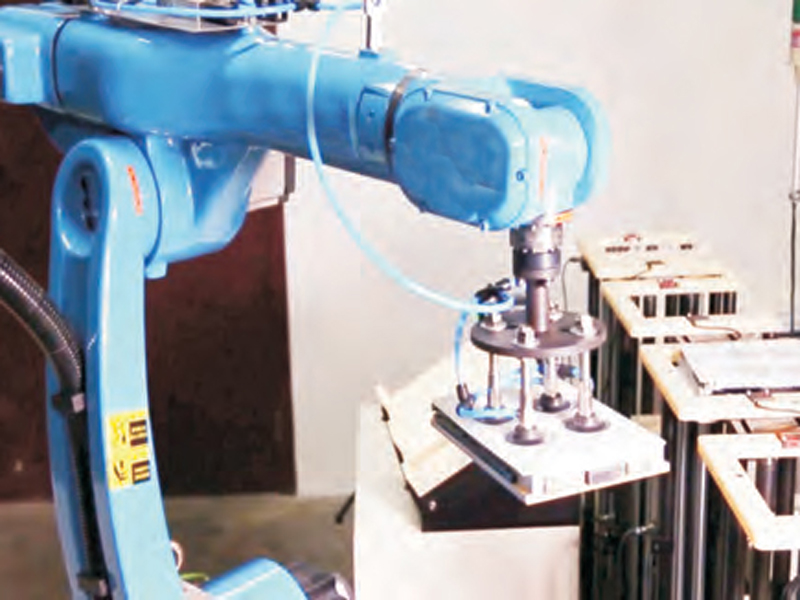
روبوٽڪ فڪسچر: ٽولنگ فڪسچر ڪسٽمائيز گهرجن مطابق مختلف ڪشش ثقل ۽ مقدار چونڊي سگھي ٿو، ۽ اهو آخر واري فلانج تي نصب ٿيل آهي، جيڪو ترتيب ڏيڻ آسان آهي ۽ استعمال جي وسيع رينج آهي.