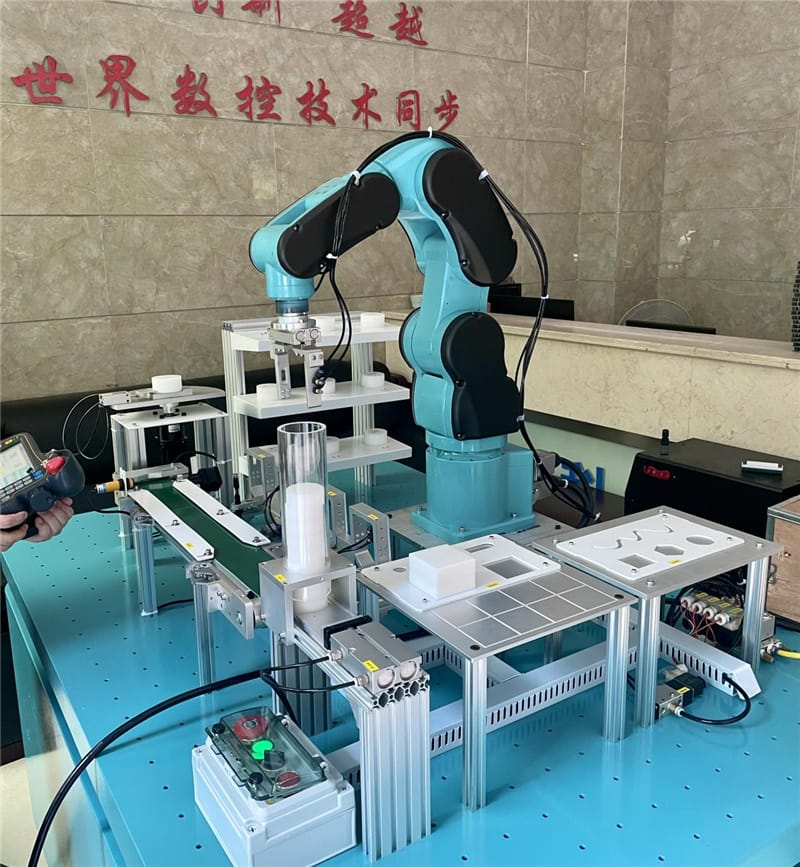
صنعتي روبوٽ ڪنٽرولر 4 محور 6 محور 8 محور
پيداوار جي خاصيت
1. مشين کي ڪڏهن به نه ڪرش ڪريو، سسٽم کي يادگار فنڪشن سان (Abosolute فيچر)
2. هن 4-8 جوائنٽ ايڪسس ويلڊنگ روبوٽ ڪنٽرولر ۾ هارڊ لمٽ انسٽال ڪرڻ جي ضرورت ناهي سڀ ڪٽ ۽ واپس زيرو پوائنٽ ڏانهن (Abosolute فيچر)
3. وائي فائي فنڪشن ذريعي ڪنٽرولر سان فون ڪنيڪٽ استعمال ڪريو، پروگرام موڪلڻ ۾ آسان ۽ وڌيڪ آسان (نيوڪر فيچر)
4. جي ڪوڊ پروگرام، صرف نيوڪر-سي اين سي روبوٽ ڪنٽرولر جي ڪوڊ پروگرام جهڙوڪ سي اين سي ڪنٽرولر سان ڪم ڪري سگهي ٿو (نيوڪر فيچر)
5. ٽيڪنيڪل پيرا ميٽر سان فنڪشن سيکاريو، هلائڻ ۾ آسان (نئون ڪار فيچر)
6. پي ايل سي ۽ ميڪرو پروگرام سڀ کليل آهن (نيوڪر فيچر)
7. ڪنٽرولر مان صرف هڪ ڪيبل نڪرندي آهي، ڳنڍڻ آسان آهي (بس قسم جي خاصيت)
8. گھڻ-سطح بي ترتيب پاسورڊ تحفظ، وڌيڪ حفاظت (نيوڪر فيچر)
پيرا ميٽر تفصيل (جي ڪوڊ ڏيکاري ٿو)
1.ڪنٽرولر شافٽ جو تعداد:صنعتي خودڪار موٽر مين آرڪ ويلڊنگ روبوٽ جو 4-8 محور ڪنٽرول پينل (j1,j2,j3,j4,j5,j6)
2. قسم: بس مطلق قسم ۽ سرو قسم
3. سڀ کان وڌيڪ پروگرامنگ: ±99999.999
4. موٽر جو انڪوڊر: 17 بِٽ ۽ 23 بِٽ
5. I/O پوائنٽس: 48*32 I/O
6. 0-10V اينالاگ: 2 طريقا 0-10V اينالاگ
7. آپريشن: سيکاريو، ريپالي، ريموٽ
8. وائي فائي فنڪشن: پروگرام موڪلڻ لاءِ فون سان ڳنڍيو
9. RS 232 فنڪشن: PC سان ڳنڍڻ لاءِ RS232
10. USB فنڪشن: پروگرام کي اپڊيٽ ڪريو ۽ موڪليو
11. پروگرام موڊ: سيکاريو، جي ڪوڊ، ٽيڪنڪس پيرا ميٽر
12. موشن فنڪشن: پوائنٽ کان پوائنٽ، سڌي لڪير، آرڪ
13. هدايتون: حرڪت، منطق، حساب، ٽيڪنڪس، سي اين سي ۾ جي ڪوڊ
14. ڪوآرڊينيٽ سسٽم: گڏيل، استعمال ڪندڙ، اوزار، دنيا
15. پي ايل سي فنڪشن: ڏاڪڻ کي تبديل ڪريو، 8000 قدم
16. الارم جي معلومات: ايمرجنسي، ڊرائيو، سار سنڀال، شروعاتي آرڪ ۽ ڪوآرڊينيٽ جي غلطي
17. حد جي ڪم: نرم حد
18. ڪنٽرولر جو الگورتھم:
1) عمودي ملٽي جوائنٽ سيريل ٽوبوٽ؛
عمودي بيان ڪيل متوازي لوگرام روبوٽ؛
3) عمودي ملٽي جوائنٽ ايل شڪل کلائي روبوٽ؛
4) قطب ڪوآرڊينيٽ روبوٽ؛
5) اسڪارا روبوٽ؛
6) ڊيلٽا روبوٽ؛
7) خاص روبوٽ؛
19. پاسورڊ تحفظ: گھڻ-سطح بي ترتيب پاسورڊ تحفظ
20. استعمال ڪندڙ ميڪرو پروگرام: آهي
21. بجلي جي گيئر فنڪشن: آهي
22. ايپليڪيشن: ويلڊنگ، پيليٽنگ، پينٽنگ، ٽينڊنگ، ليزر ڪٽنگ ۽ ٻيا خاص روبور بازو
گراهڪ جي ساراهه
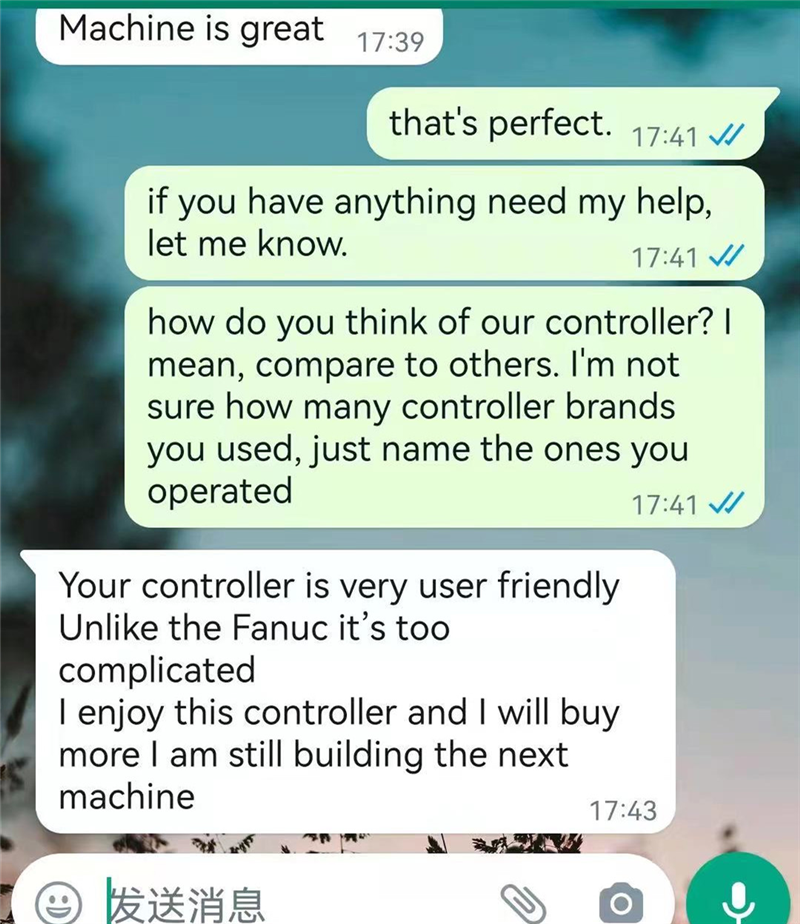
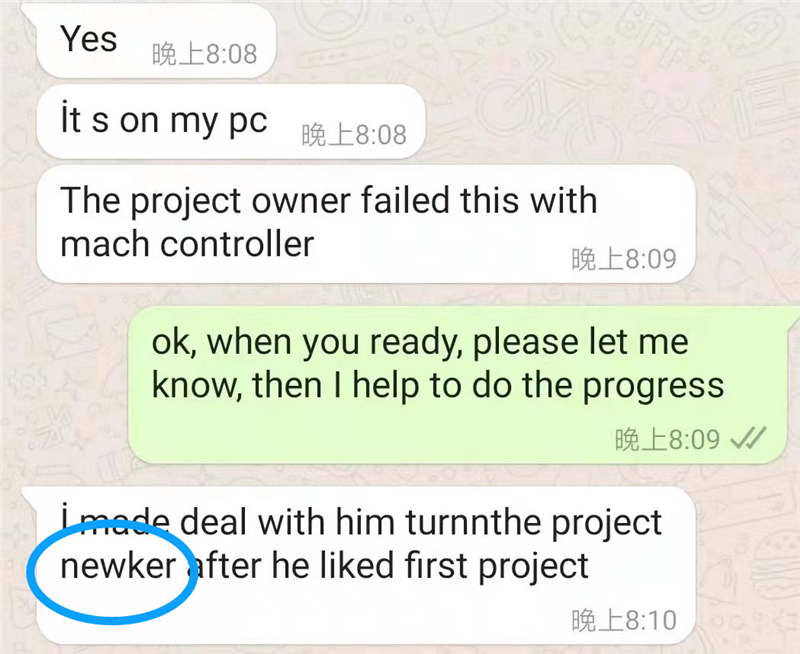
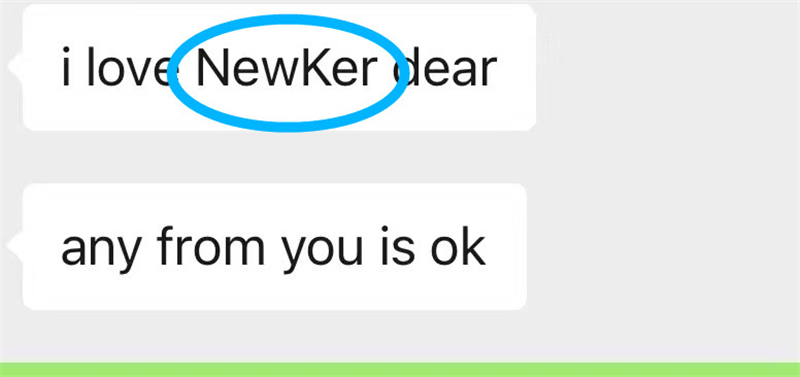

ڪسٽمر ڪيس